Enginyeria de la imatge STEVE-6D Manual d'usuari

1 INTRODUCCIÓ
El programari STEVE-6D avalua el rendiment d'estabilització d'imatge de les càmeres digitals. La imatge següent il·lustra un exampConfiguració del fitxer per analitzar vores inclinades de baix contrast mitjançant el gràfic de prova TE261. La càmera es munta a la STEVE-6D i es fa vibrar mentre la funció d'estabilització d'imatge de la càmera s'activa i s'apaga per capturar imatges en diferents temps d'exposició. A partir d'aquí, el programari analitza l'amplada de la vora de les vores inclinades borroses i després calcula el rendiment d'estabilització en f-stops. Aquest programari també pot controlar l'iQ-Trigger i el maquinari STEVE-6D amb un generador d'ona sinusoïdal, formes d'ona d'usuari personalitzades o l'encaix personalitzat de CIPA.

STEVE-6D – Solució clau en mà
INTERFAÇ GRÀFICA D'USUARI
El programari STEVE-6D es divideix en dos mòduls principals, un per a la comunicació amb el maquinari STEVE-6D i l'altre per al càlcul del rendiment d'estabilització d'imatge [1].

Mòdul per al control de vibracions de STEVE-6D
Mòdul de control de vibracions
El mòdul "CONTROL DE VIBRACIONS" configura les dades de la forma d'ona i gestiona la interfície entre
STEVE-6D i l'iQ-Trigger. El "CONTROL DE VIBRACIONS" es divideix en quatre parts diferents, la primera part [2] canvia entre les pestanyes següents.
Pestanya de connexió
Per connectar-vos amb STEVE-6D, feu clic al botó "Connexió" [1] i l'STEVE-6D farà referència automàticament als sis eixos a la posició zero. Per desconnectar, feu clic al botó vermell [2] a
dret. Si passeu el cursor del ratolí per sobre de l'element d'informació [3], es revelarà informació sobre el controlador connectat, com ara el número de sèrie i la versió del microprogramari a la informació sobre eines.

Pestanya de connexió
Pestanya Presets
El sistema de càmeres es pot alinear fàcilment definint el punt de rotació, conegut com el punt de pivot [1], i la posició local/zero [2]. Cada corba de dades de forma d'ona fa referència a aquesta posició.
El punt de pivot predeterminat (x=y=z=0) es troba al centre inferior de la placa de retenció. Podeu canviar la seva posició a la que millor per a la vostra aplicació. Per exampAmb un telèfon mòbil, té sentit establir el punt de pivot al centre del telèfon, ja que aquest sol ser el centre de rotació quan un usuari el subjecta. Tanmateix, una càmera SLR probablement té un centre de rotació diferent a causa de la seva geometria molt diferent

Pestanya Presets
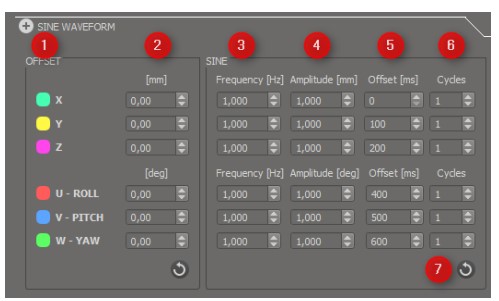
Pestanya de forma d'ona sinusoïdal
Un generador d'ona sinusoïdal per a cada eix crea una manera ràpida de configurar les dades de la forma d'ona. Per definir una nova forma d'ona, canvieu els valors de la compensació de la posició [2], la freqüència [3], amplitud [4], i
desplaçament de temps [5]. El quadre de rotació "Cicles" [6] defineix amb quina freqüència s'ha de repetir el sinus. Per realitzar la forma d'ona, feu clic al botó "MOVE". Feu clic al botó de la cantonada inferior dreta [7].
Pestanya de forma d'ona sinusoïdal
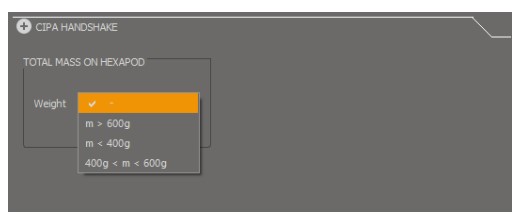
Pestanya d'encaixada de mans CIPA
Per realitzar qualsevol de les tres encaixades de mans CIPA, primer, seleccioneu el pes del sistema òptic. A partir d'aquí, les dades de la forma d'ona es carreguen automàticament al controlador STEVE-6D i comença el moviment
quan es fa clic al botó MOVE. A causa de l'acord de confidencialitat CIPA, la "TRAMA DE FORMA D'ONA" és només un example
CPestanya d'encaixada de mans de l'IPA
Pestanya de forma d'ona personalitzada
Per forma d'ona estàndard
Pengeu una forma d'ona personalitzada a STEVE-6D creant un .txt senzill file amb coordenades cartesianes. Tots els valors s'han de separar amb un punt de tabulació. La seqüència d'eixos és XYZUV W. Estableix la sampling de la forma d'ona al programari STEVE-6D i després carregueu el .txt file al programari. Totes les coordenades són independentment del punt de pivot i de la posició d'origen. La càrrega de la forma d'ona comença automàticament després del .txt file es carrega al programari STEVE-6D. File definició per a la forma d'ona estàndard: (Feu servir la pestanya com a separador)

Per dades espacials
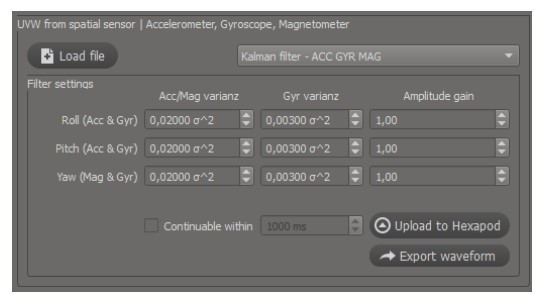
Utilitzeu les dades del sensor espacial quan analitzeu dispositius com ara telèfons intel·ligents (acceleròmetre, giroscopi, magnetòmetre). Per obtenir valors de rotació més precisos, configureu el paràmetre per a la variant Acc/Mag & Gyr.
El ampguany de litud és només per escalar el amplitud. Un cop establerts tots els paràmetres, feu clic al botó de càrrega a l'hexàpode per començar el moviment. La casella de selecció continuable permetrà a l'usuari establir una durada perquè la forma d'ona continuï sempre que la posició inicial sigui diferent de la posició final. També hi ha l'opció d'utilitzar només les dades de l'acceleròmetre o del giroscopi.
El botó d'exportació de forma d'ona es pot utilitzar per desar la forma d'ona i per al càlcul del rendiment d'IS. Les dades sampLa velocitat de ling és de 1000 Hz
Configuració del sensor espacial
File definició per UVW del sensor espacial:
| HH:MM:SS.ZZZZ | AccX[g] | AccY[g] | AccZ[g] | GyrX[rad/s] | GyrX[rad/s] | GyrX[rad/s] | Mag[µt] | Mag[µt] | Mag[µt] |
Pestanya Activador
L'alliberament remot de la càmera es pot realitzar amb l'iQ-Trigger. És possible definir diversos temps d'alliberament fent clic a "GRAÇA DE FORMA D'ONA" o escollint manualment el temps a la pestanya iQ-Trigger [3]. Si es necessita un temps de llançament aleatori, definiu el recompte d'alliberaments per forma d'ona [2]. Cada llançament de l'iQ-Trigger es defineix pel retard del tir, la durada del llançament i el temps delta entre dos llançaments de la càmera [1].

Les línies verticals indiquen els temps de llançament de Digitus
Envia a maquinari, estat i recompte d'imatges/formes d'ona
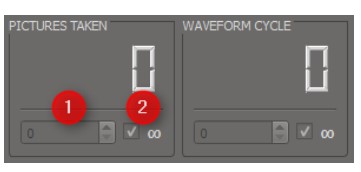
Tota la informació sobre l'estat de la connexió o els errors es mostra a l'àrea "STATUS". Per iniciar un moviment, premeu el botó "MOVER". En fer clic al botó "Posició inicial", l'STEVE-6D es mou directament a la posició d'inici, que es va establir anteriorment a la pestanya "PRESETS". Si cal tornar a calibrar l'STEVE-6D, feu clic al botó "Plataforma de referència". Quan es defineix un valor per a "FOTO FOTO" o "CICLE DE FORMA D'ONA", és possible aturar el moviment de STEVE-6D automàticament. Establiu el valor a il·limitat [2] o trieu un valor per al nombre de recomptes [1] que s'hauria d'activar l'iQ-Trigger o s'hauria d'executar la forma d'ona.
Analitzar dades
El mòdul "Analitzar dades" fa el càlcul d'estabilització d'imatge. Aquest mòdul té tres parts significatives. La primera part és l'"Eina de metadades" [1], que estableix les metadades de la càmera. El segon
part és el processament de lots d'imatges per al càlcul IS-Performance [2]. La part final mostra els resultats de les imatges capturades.
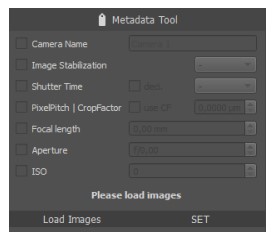
Metadades
És essencial disposar d'informació de metadades de la càmera per als càlculs de rendiment d'IS, com ara el pas dels píxels i el temps d'obturació. Si la càmera no enregistra aquesta informació a la imatge file, carregueu un lot d'imatges i escriviu-lo manualment a la imatge .jpg. Carregueu les imatges, configureu els paràmetres i, a continuació, premeu el botó "SET".
NOMÉS PER A IMATGES JPEG
Carregueu imatges per al càlcul IS-Performance
Un cop carregada la sèrie de referència, trieu una sèrie de prova per a IS-ON. Es requereix almenys una sèrie d'imatges per a ISOFF. Si s'ha utilitzat la forma d'ona d'encaixada CIPA, la sèrie de proves per a IS-OFF no és necessària.
En lloc d'això, feu clic al botó de CIPA i, a continuació, seleccioneu el pes de la càmera. Les imatges de mesures de formes d'ona personalitzades es poden carregar fent clic al botó de dades de moviment personalitzades. El "centre d'anàlisi d'imatge
només" està disponible per a dades més ràpides però menys precises. Quan escolliu aquesta opció, només s'utilitza el quadre de la vora mitjana durant el càlcul.

Un cop escollides les opcions, un arbre view apareixeran de les diferents sèries, com es veu a continuació. Si no hi ha metadades d'imatge disponibles, feu servir l'"Eina de metadades", que s'indica amb un missatge d'error
després de carregar les imatges al programari STEVE-6D. Un cop finalitzat, el càlcul del rendiment d'estabilització d'imatge es pot iniciar fent clic al botó "Procés". Un resultat file amb una sola vora els càlculs d'amplada es desaran a la carpeta amb les imatges.
| Temps d'exp. [s] | Pitch [pix] | Guia [foto] | Sqrt(p^2+y^2) |
IS-Rendiment
L'amplada de la vora calcula el rendiment IS en μm en funció del temps d'exposició. Les amplades de vora de les sèries ISON i IS-OFF (o dades de moviment) es converteixen a la mida d'una postal amb un viewdistància de 65-80 cm per dur a terme aquest procés. El rendiment d'estabilització d'imatge en f-stops [2] es troba als punts d'intersecció de la corba IS-ON i IS-OFF amb un límit de determinació de 63μm [1]. El valor numèric de l'IS-Performance es mostra en f-stops.

Selecció de dades del resultat
Per seleccionar resultats únics del càlcul IS-Performance, moveu un dels controls lliscants [1] per a "SERIES",
"TEMPS D'EXPOSICIÓ", "FOTO" o "ROI" (regió d'interès). Aquest moviment canviarà el que es mostra
resultats per a la funció de dispersió de vora ("ESF") [3], resposta de freqüència espacial ("SFR") [4] i la
Pestanya “ENTRADA IMATGE” [5]. La informació detallada es pot mostrar o ocultar amb el botó "INFO" [6].

Funció d'extensió de vora (ESF)
L'ESF calcula cada amplada de vora. Per tant, un oversampLed vora inclinada d'una imatge El ROI es calcula a partir de cada imatge. Cada imatge inclou vint vores inclinades, incloent-hi deu en el to i
deu en la direcció de guiñada.
Resposta de freqüència espacial (SFR)
El SFR no s'utilitza per al càlcul de rendiment IS. En canvi, descriu la funció de transferència de modulació de cada ROI.
Imatge d'entrada i selecció de ROI
És possible canviar o mostrar la regió d'interès per a cada resultat. Feu clic al botó "Edita ROI" i canvieu la ubicació del ROI. Per establir un ROI nou, feu clic al botó i utilitzeu el botó "-" per suprimir un ROI. Per obtenir un efecte de zoom, feu clic al botó "Zoom +" i dibuixeu un rectangle a la imatge.
Gestió d'errors
Si el programari no detecta els 20 ROI en una de les imatges, s'ha produït un error durant la llista d'imatges d'entrada view. Si això passa, seleccioneu la imatge i definiu manualment els ROI que falten per a la imatge.
CDRET D'OPY INFORMACIÓ
En instal·lar aquest programari, accepteu i accepteu estar subjecte als termes de l'acord de llicència de programari que apareixen a continuació.
Copyright © Image Engineering GmbH & Co. KG, 2021
El programari subministrat en virtut d'aquest acord s'ofereix "tal qual", sense cap garantia ni representació expressa o implícita, inclosa, però no limitada a, cap garantia implícita de comerciabilitat o adequació per a un propòsit particular. És responsabilitat exclusiva del consumidor determinar la idoneïtat del programari per a un propòsit o ús concret. Image Engineering GmbH & Co.
KG, i qualsevol altra persona que hagi participat en la creació, producció, lliurament o suport d'aquest programari, en cap cas serà responsable dels danys directes, indirectes, especials, conseqüents o incidentals derivats de qualsevol defecte, error o omissió. en el disquet o programari o de qualsevol altre esdeveniment, inclòs, entre d'altres, qualsevol interrupció del servei, pèrdua de beneficis o fons de voluntat, acció legal o qualsevol altre dany conseqüent. L'usuari assumeix tota la responsabilitat derivada de l'ús d'aquest programari, pel qual Image Engineering GmbH & Co. KG no tindrà cap responsabilitat, independentment de si aquest ús és lícit o previsible. Image Engineering GmbH & Co. KG no serà responsable de cap dada o programa emmagatzemat o utilitzat amb aquest programari, inclosos els costos de recuperació d'aquestes dades o programes. Image Engineering GmbH & Co. KG es reserva el dret de fer correccions o millores a la informació proporcionada i al programari relacionat en qualsevol moment, sense previ avís.
Llegeix més sobre aquest manual i baixa el PDF:
Documents/Recursos
 |
Enginyeria de la imatge STEVE-6D [pdfManual d'usuari STEVE-6D, STEVE |



